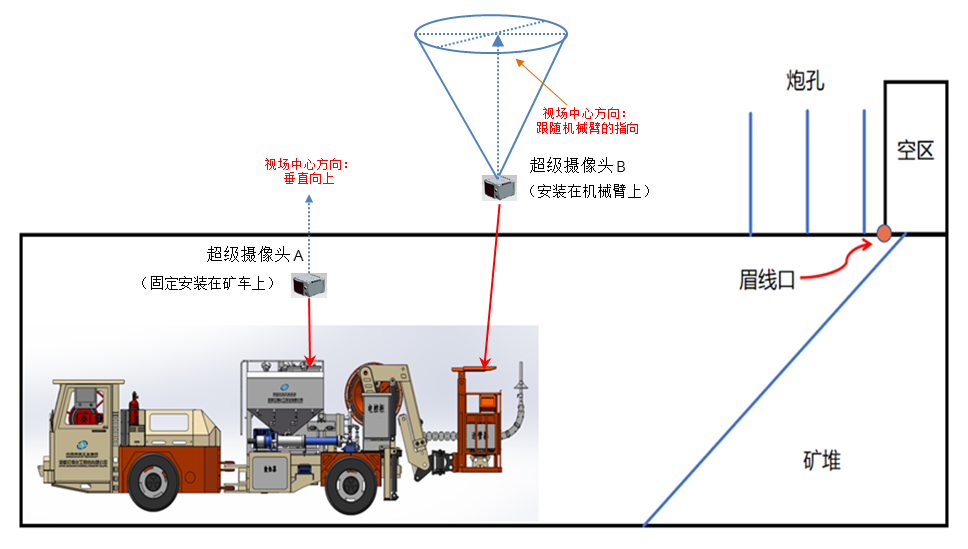
地下矿山自动化作业 昱感微与某爆破工程企业合作地下矿山自动寻孔项目,无人驾驶矿车需要找到炸药孔的位置和角度,并将炸药笔直地塞入孔中(不能弯折,否者会影响炸药效果)。昱感微与合作伙伴构建了一套矿井智能自动寻孔系统设备,系统包含多模态感知“多维像素“超级摄像头和应用处理器单元,安装于装药台车上,具有自动识别顶部炮孔和自动定位顶部炮孔功能。通过安装在台车上的“多维像素”多模态感知超级摄像头,来获取矿井上壁的炮孔孔洞信息,并通过对应的应用软件来识别与判断炮孔,然后再计算出炮孔相对大臂支点(或者定位在矿车上的其它参考点)的三维坐标信息:炮孔的入口中心原点位置(x,y,z三维坐标信息)以及炮孔内径中心轴的对应角度数据,传输给台车的中心计算系统。 矿井智能寻孔设备基于“多维像素”超级摄像头输出的“多维像素”数据,在其中的图像信息(包含可见光图像以及远红外摄像头捕获的红外图像-对应黑暗区域的孔洞查找,以及2个维度感知图像的特征二次确认)先定位孔洞的基本位置,再基于“多维像素”多模态3D数据来确认孔洞:定位孔洞的圆心(中心原点:XYZ)以及孔洞内壁对应的中心轴;这里的相对定位坐标系是对应安装在此处的超级摄像头的感知空间坐标系,台车内部的计算中心(中央域控制器)可以基于在此处的超级摄像头的安装位置和角度,将对应孔洞及其内壁中心轴在超级摄像头的感知空间坐标的数据,转换到装药台车统一的系统定位坐标系里;通过对孔洞内壁对应反射出来的3D点云的建模可以精确地探测出孔洞内壁对应的中心轴,从而可以精准地找到孔洞和其角度,完成地下矿山自动化装药爆破。